Sandor Felber
- Robot Learning Research Engineer
- Improbable AI Lab (within MIT CSAIL)
- Massachusetts Institute of Technology
- MEng Electrical & Mechanical Engineering
- The University of Edinburgh
Projects
Skills
- Deep Reinforcement Learning for Quadruped and Humanoid Robotics
- Background in Control and Hardware Design for Electric Drive Systems and Actuators
- Proficient in Python, C/++, MATLAB, Simulink, ROS
- Experienced with Complex Mobile Robots & Autonomous Vehicle Architectures
- Knowledgeable in Machine Learning, Reinforcement Learning, and AI for Control Systems
- Skilled in CAD (Catia, Solidworks), PCB (Altium), and Electromechanical Hardware Design
- Track-record of Successful Leadership, Project Management, and Communication
About Me
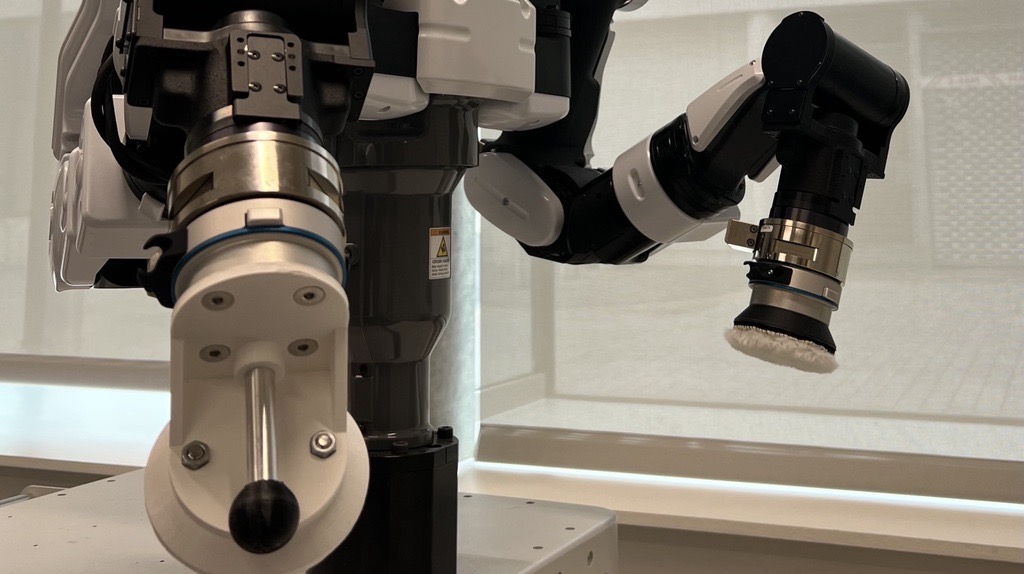
Researcher in humanoid robotics at the Computer Science and Artificial Intelligence Lab (CSAIL) at MIT.
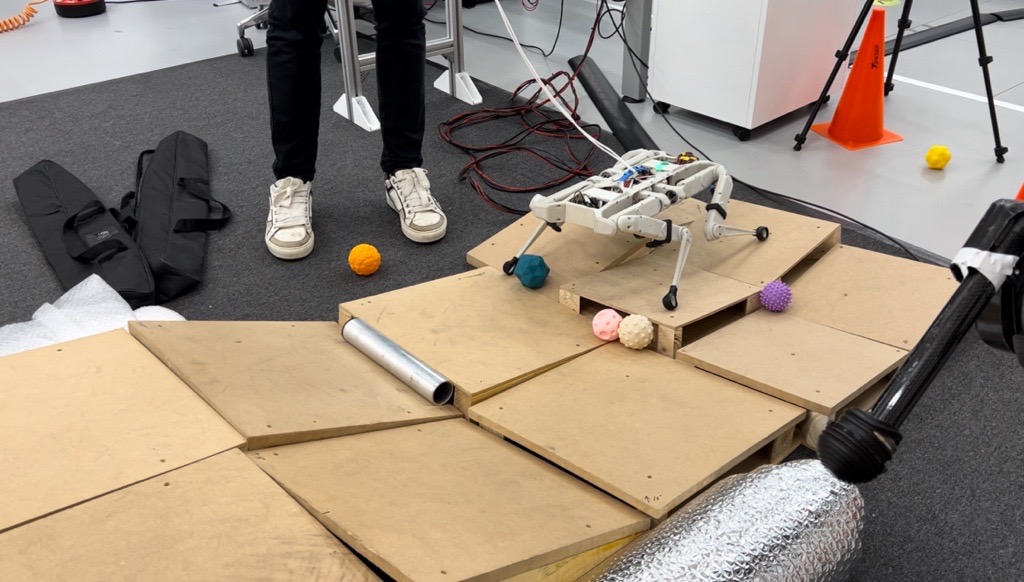
Currently developing a control system for agile locomotion of quadruped and humanoid robots using deep reinforcement learning.
Early 2023, I completed an 8-month placement with the Edinburgh Centre of Robotics developing planning and control systems for robotic actuation.
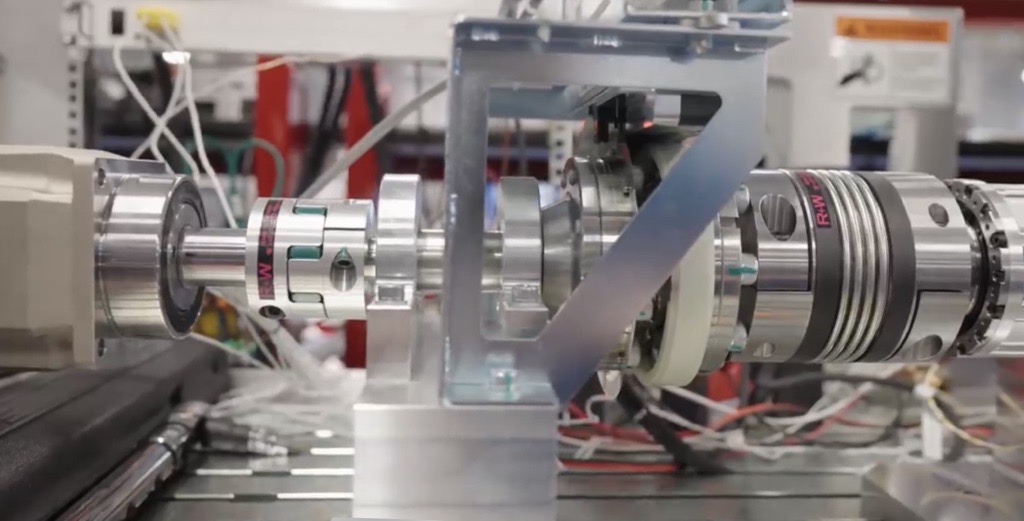
In 2022 summer, I interned with Tesla designing control systems, firmware, and testing processes for electric motors and actuators in the Robotics R&D department in Palo Alto.
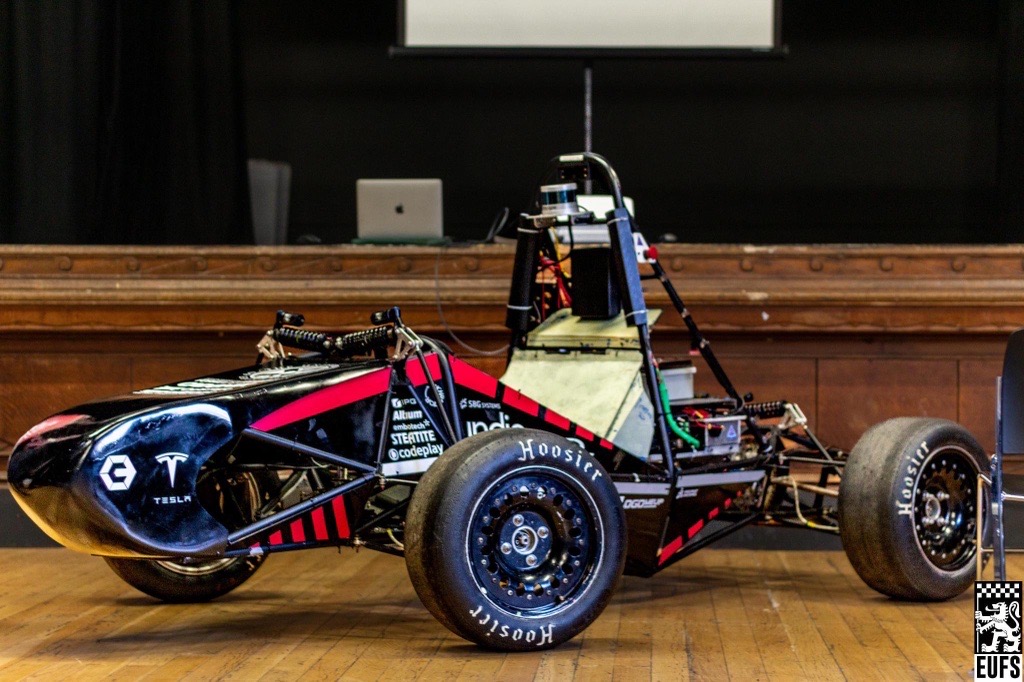
As President of EUFS, I'm leading the UK's #1 autonomous racing team, designing autonomous vehicle hardware and software for the Formula Student UK competition.